超宽带 (UWB) 是一种射频无线技术,可以增强高级驾驶辅助系统 (ADAS) 和联网自动驾驶汽车 (CAV) 传感器套件。UWB 的加入可以避免致命的碰撞并确保车联网 (V2X) 连接的可信部署,从而增加挽救生命的数量。
技术进步正在改变我们的日常生活,并对整个行业产生重大影响。这适用于汽车行业,该行业继续采用新技术来增强消费者体验、安全性和保障性。当今最大的担忧之一是严重的交通碰撞,这是一个可以应用技术拯救生命的领域。许多努力正在定义、开发、标准化和实施改善道路安全的最佳技术。最初,制造商在车辆内部使用独立的 ADAS 技术,例如雷达和摄像头。借助这些技术,每个制造商都可以实施自己的系统,而无需标准化。
安全方面的下一个重大飞跃将是车辆共享信息,使它们能够相互合作。这将需要标准化以确保来自不同制造商的车辆的连通性。正在努力通过标准化 V2X 连接(包括车对车 (V2V)、车对基础设施 (V2I) 和车对行人 (V2P) 协议)为联网车辆提供基础。V2X 标准化工作为采用增强 ADAS 和 CAV 传感器套件的新技术开辟了道路。
UWB 是一种低成本的射频技术,可用于精确测量两点之间的距离。这导致了完美的结合:UWB + V2X。UWB + V2X的采用和标准化可以增加功能,包括精确定位、安全识别和高更新率下的超低延迟。本文将重点介绍 UWB + V2V 和 UWB + V2P的几个关键救生应用。然而,值得注意的是,UWB + V2I 还可以极大地提高消费者便利性的许多应用,例如自动代客泊车和与电动汽车充电器对齐。
超宽带技术
IEEE 802.15.4z 为安全测距的 UWB 标准化提供了规范。该标准的安全方面确保距离测量是准确的,并且不会被外部来源欺骗。UWB 安全测距的工作原理是测量非常窄的射频脉冲从发射器传播到接收器所需的时间。这个“飞行时间”乘以光速得到距离。窄脉冲使系统能够准确了解多径干扰并选择第一条路径,确保识别最近的物体。
许多脉冲组合在一起形成帧。每个安全测距帧都包含一个加扰时间戳,该时间戳是使用加密技术创建的,以确保距离测量的可靠性。可以在不到 200 µs 的时间内传输单个帧。帧在组中所有节点的收发器之间来回发送,提供所有节点之间的往返距离测量。对于简单的单侧双向测距操作,往返测量可在 1 ms 内完成,更新速率为 1000/s。
UWB 以大于 500 MHz 的带宽运行,当与适当的信号处理技术相结合时,可以提供精度低至 10 cm 的距离测量。所有这些功能都可以在单个低成本 CMOS 器件上实现。更多背景信息和 UWB 技术概述可在 Qorvo 出版物Ultra-Wideband for Dummies中找到。1
合作驾驶
汽车行业开始构想其互联的未来,开启了协同自动驾驶的新时代。这包括用例,例如从红绿灯组出发、交叉路口、车辆编队和车道之间的合并。这些用例需要知道车辆的相对位置,其精度优于 1 m,在某些情况下可低至 10 cm。通过共享准确的定位信息,车辆可以协同工作,以比人类更安全和更快的反应时间来执行这些功能,从而使它们能够在最少或无需人工干预的情况下进行操作。
V2V 通信的基本功能之一是在美国交换基本安全信息 (BSM),在欧洲交换合作意识信息 (CAM)。这些消息包括车辆位置、速度和航向等信息。根据这些粗略的位置数据,车辆的自主导航系统 (ANS) 可以确定附近还有哪些其他车辆。然后可以组成小组进行合作演习。
在联网车辆的复杂协作操作中,必须保持适当的分离以避免车辆之间的致命接触。致力于未来互联移动和智能交通解决方案的全球组织 5G 汽车协会 (5GAA) 表示,精确定位是需要解决的关键问题之一。保持车辆分离需要能够以快速更新速率提供精确位置测量的技术。
UWB 可以以低至 10 厘米的精度执行此功能,这是该技术在全球范围内发展的原因之一。UWB 还可以通过防止车辆与自行车、摩托车和行人等易受伤害的道路使用者 (VRU) 之间的碰撞来挽救生命。UWB 在许多消费产品和应用中迅速普及。许多领先的手机都包括 UWB,并且该技术正在被添加到汽车中,以使手机能够充当安全的数字密钥。
如果汽车中的 UWB 和手机中的 UWB 可以一起用于拯救生命,那不是很好吗?如果车辆可以与行人的手机 (V2P) 通话并使用 UWB 测量他们之间的距离,则可以避免车辆与行人的碰撞。UWB 可以通过防止恶意欺骗来提高通信的安全性,这是 CAV 的一个重要问题。通过验证车辆的 ID 和位置,UWB 可以验证与预期车辆的通信,而不是有人冒充该车辆进行恶意用途。最近的报告已经证明了代价高昂的基础设施勒索漏洞的影响,这些漏洞破坏了许多系统并导致服务中断。您能想象驾驶 CAV 在高速公路上行驶并收到勒索要求付款,否则车辆可能会撞毁?
带有大物体的超宽带
大多数关于 UWB 的文献都集中在确定到小物体的距离上。但是,当超宽带应用于车辆等大型物体时,仅知道到车辆某处某个点的距离是不够的。在移动车辆的情况下,测量必须是相对的和连续的。使用多个 UWB 传感器,每辆车可以连续计算另一辆车所有四个角的相对位置。在本文的其余部分,术语位置将指相对位置。
对于协作机动,ANS 可以识别适当的车辆并使用 V2V 链接组成一个组。组形成后,ANS 将使用适当的 UWB 传感器识别、初始化并开始连续测量,再次使用 V2V 链路。图 1显示了两辆车拐角附近的 UWB 传感器如何形成横杆布置。通过在每辆车的前、后和侧面分别放置两个传感器,可以确定两辆车的位置和方向。每个 UWB 链路都提供了一种独特、安全的方法来测量精确距离,并支持数据通信。数据通信可以通过交换额外的细节来进一步增强安全性。
图 1使用 UWB 交叉开关连接的两辆车。
高速安全
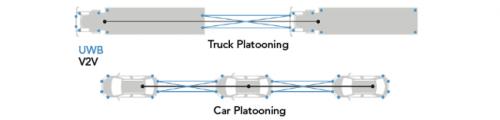
在涉及多辆车辆的高速机动中,CAV 的正常运行至关重要。一个常见的例子是列队行驶(见图 2),其中几辆车辆以紧密的队形行驶,相互牵引以节省燃料。编队将帮助卡车运输业提高安全性,同时降低燃料成本和排放,以及减少拥堵和更快地交付货物。它还可以帮助扩大电池容量有限的电动汽车的续航里程。
图 2使用 UWB 保持分离和方向的车辆排。
UWB 链路使列队车辆能够准确测量它们之间的距离并保持适当的分离和方向。在一个排中,每辆车都在近距离跟随另一辆车。反应时间很关键。如果排以 60 m/s (135 MPH) 的速度行驶并且车辆之间的间隔为 6 m (20 ft),则排中的车辆必须在不到 100 ms 的时间内做出反应,以避免在领头车辆突然施加压力时发生碰撞刹车。这可以通过 UWB 轻松实现。
在多对多 UWB 架构中使用四个传感器,应在 10 毫秒内完成一轮测距,具体时间取决于实施。一轮测距是四个传感器测量图 2 中所示的四个距离所需的时间。对于以 60 m/s 行驶的车辆,10 ms 的测距轮时间意味着车辆在消息之间仅行驶 60 cm ,让每辆车有足够的时间对前车的速度变化做出安全反应。多个 UWB 链路使列队车辆能够保持彼此正确的方向。这可以使每辆车的 ANS 跟随前车绕弯,与前车保持在同一轨道上。
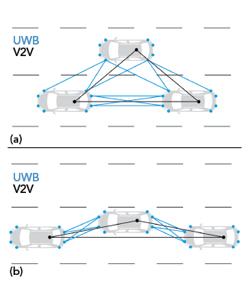
合并是 CAV 可以从 UWB 传感器中受益的另一个过程。车辆需要合并的情况示例包括从入口匝道进入高速公路或加入排中间。图 3显示了一种情况,其中一辆车需要与其他两辆联网车辆合并。ANS 首先使用 V2V 建立连接,形成一个组并传达合并的需要。然后,系统将确定操作所需的 UWB 传感器,初始化这些传感器并启动连续的 UWB 感测(参见图 3a)。
图 3车辆在合并前加入具有 V2V 和 UWB 的车辆组 (a),然后完成合并 (b)。
下一步是让两辆车形成一个间隙,让合并的车辆加入。如图 3b 所示,合并的车辆随后将进入其他两辆车辆之间的车道。ANS 确定参与所需的适当 UWB 传感器。加入排后,超宽带传感器保持连续运行,以调节车辆的距离和方向。
超宽带和 V2P
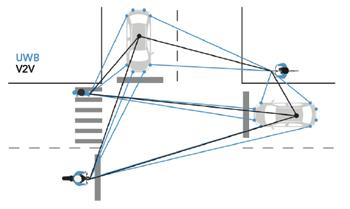
图 4三路停靠点的三个 VRU。
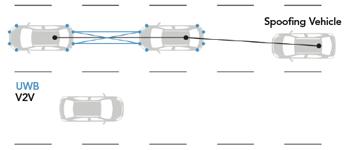
图 5使用 UWB 检测欺骗的“透视通过”场景。
另一个关键的潜在救生应用利用 VRU 的智能手机或其他支持 UWB 的设备将 UWB 与 V2P 通信相结合。这与 V2V 的工作方式类似:ANS 与 V2P 相结合,可以确定 VRU 是否在附近,然后开始 UWB 距离测量过程。UWB 跟踪 VRU 的确切位置并确定发生碰撞的可能性。例如,停在十字路口的车辆(如图 4所示的三向停车处)可以使用 UWB 传感器确定与 VRU 的距离并避免碰撞。
验证提高的安全性
UWB 还可用于降低联网汽车威胁场景的风险。Car Connectivity Consortium 已经在其 Digital Key 3.0 规范中加入了 UWB,使驾驶员能够安全地使用手机打开和启动汽车。UWB 通过测量车主与车辆之间的距离来提高安全性。确保车主在车辆附近可防止“中间人”车辆攻击,窃贼拦截并转发来自车主手机的远处信号以获取访问权限。
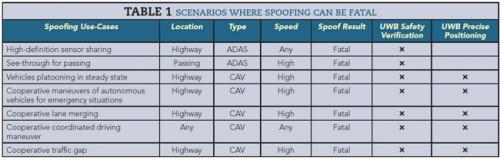
对于 V2V 通信,车辆可以信任从其他车辆接收到的信息对于安全至关重要。检测行为不端的参与者传输不准确的信息(无论是无意还是恶意)是一个重要的安全和安全问题。UWB 可以通过确保车辆了解彼此的位置、验证其身份和检测不当行为来提供车辆之间所需的信任。当通信中包含对生命至关重要的信息时,这一点尤其重要。表 1中的分析总结了最关键的 5GAA 协作驾驶用例,其中不准确的信息可能是致命的。
UWB 传感器可用于验证通过 V2V 进行通信的车辆是否确实位于指示的位置。如果该位置与 BSM 或 CAM 中传输的 GPS 坐标不相关,则车辆之间的任何交易都将受到质疑,并且可以采取适当的预防措施。识别系统中行为不端的参与者,然后撤销他们的认证,将有助于确保一个可信的 V2V 系统。
在致命欺骗的一个潜在示例中(参见图 5),在经过的车辆 (PV) 后面行驶的欺骗车辆 (SV) 通过发送不正确的 GPS 坐标假装在车辆前方,错误地表明它在 PV 前方而不是在它后面。如果 PV 请求“通过”信息,则 SV 可以传输清晰道路的图像。基于这些虚假信息,PV 将开始通过并可能与迎面而来的车辆发生正面碰撞。如果 PV 能够使用 UWB 验证 SV 是否真的是前面的车辆,则可以避免这种情况。
UWB 还可用于在其他用例中准确识别车辆。紧跟在紧随其后的两辆车后面,可能很难知道您的车辆正在与哪两辆车进行通信。UWB 距离测量可以确认与适当车辆的通信。另一个例子:跟随两辆车在相邻车道上并排行驶。如果一辆车正在使用实时运动学来调整其 GPS 坐标,而另一辆车没有,则两辆车可能报告相同的位置。
增强 CAV 传感器套件
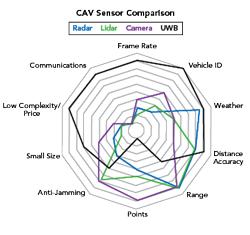
图 6 CAV 传感器比较。
UWB 为现有的 CAV 传感器套件提供了极好的增强。其高帧速率提供比任何其他系统更快的反应时间。除了传感之外,还提供通信的能力使 UWB 能够提供安全的距离测量并准确识别其他车辆。作为一种射频技术,它在恶劣天气下的运行比光学系统好得多。UWB 的小尺寸、低复杂性和低成本使得在车辆周围放置多个传感器成为可能。
UWB 传感器具有简单的优点,可帮助车辆更快地处理和响应信息。实现 UWB 安全测距所需的处理能力相对较小。要在不使用 UWB 的情况下提供有关两辆车的相对距离和方向的相同信息,需要雷达和摄像头。相机需要查看场景、分析图像、提取关键特征并确定方向。雷达将测量车辆之间的距离,其精度取决于雷达的分辨率和短距离性能。然后将使用传感器融合来合并相机和雷达数据,这可能需要原始源数据和广泛的 3D 图像处理算法库来组合然后提取信息。这种系统的最大帧速率可能比 UWB 帧速率慢 3 倍以上。基于 UWB 的系统的简单性还降低了代码问题导致事故的可能性。
图 6比较了 CAV 传感器。将 UWB 引入 CAV 套件提供了一个强大、更快、安全和准确的系统,具有卓越的性能价格。
概括
本文中讨论的许多技术已经存在。802.15.4z 规范提供了多对多 UWB 架构,为安全的多点测距区域网络 (RAN) 提供了基础。V2V定义了车辆组团的能力,是选择车辆参与UWB多对多RAN的基础。一旦形成一个组,就需要规范说明使用 V2V 链路的系统如何识别、选择、初始化和操作安全的 UWB RAN。为了广泛采用,需要制定标准以使来自不同制造商的车辆上的 UWB 设备能够互操作。Qorvo 正在努力将其正在申请专利的 UWB + V2X 概念作为互联汽车推出的关键部分。
UWB 技术是一个比雷达或摄像头简单得多的系统,所需的代码行数和处理资源要少得多。凭借低成本的实施、厘米精度和低延迟,UWB 提供了高性价比,使制造商能够实施更强大的 CAV 传感器套件。
联网汽车将开启汽车安全的新时代。实现这一目标的关键是在车辆之间创建一个值得信赖的通信环境。UWB 可以通过确保车辆知道彼此的位置、验证他们的身份来提供车辆之间所需的信任。这在传达对生命至关重要的信息时尤其重要。高速协作机动是一些最关键的 CAV 操作。UWB 可以提供使 ANS 能够通过比人类更快的反应,甚至比现有的雷达和摄像系统更快的反应来避免危及生命的情况所需的速度和准确性。即使在低速行驶时,车辆机动也可能导致致命事故,尤其是在涉及 VRU 时。通过使用 UWB 测量到 VRU 的距离,导航系统可以帮助确保避免事故。
|  /2
/2 




 发表于 2022-3-8 15:01:52
发表于 2022-3-8 15:01:52